Last active
April 24, 2025 14:43
-
-
Save ad-1/e2ee913e0c99b62481bd6a74d23de461 to your computer and use it in GitHub Desktop.
3D Kinematics Visualisation with Python Libraries SymPy and NumPy. https://python.plainenglish.io/3d-kinematics-visualisation-25e6b6c53e6c
This file contains hidden or bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| import os | |
| import numpy as np | |
| import sympy as sp | |
| import pandas as pd | |
| import matplotlib.pyplot as plt | |
| import matplotlib.gridspec as gridspec | |
| from arrow_3d import Arrow3D | |
| from matplotlib import animation | |
| # ============================== | |
| # vector equations | |
| def vector_derivative(vector, wrt): | |
| """ | |
| differentiate vector components wrt a symbolic variable | |
| param v: vector to differentiate | |
| param wrt: symbolic variable | |
| return V: velcoity vector and components in x, y, z | |
| """ | |
| return [component.diff(wrt) for component in vector] | |
| def vector_magnitude(vector): | |
| """ | |
| compute magnitude of a vector | |
| param vector: vector with components of Cartesian form | |
| return magnitude: magnitude of vector | |
| """ | |
| # NOTE: np.linalg.norm(v) computes Euclidean norm | |
| magnitude = 0 | |
| for component in vector: | |
| magnitude += component ** 2 | |
| return magnitude ** (1 / 2) | |
| def unit_vector(from_vector_and_magnitude=None, from_othogonal_vectors=None, from_orthogonal_unit_vectors=None): | |
| """ | |
| Calculate a unit vector using one of three input parameters. | |
| 1. using vector and vector magnitude | |
| 2. using orthogonal vectors | |
| 3. using orthogonal unit vectors | |
| """ | |
| if from_vector_and_magnitude is not None: | |
| vector_a, magnitude = from_vector_and_magnitude[0], from_vector_and_magnitude[1] | |
| return [component / magnitude for component in vector_a] | |
| if from_othogonal_vectors is not None: | |
| vector_a, vector_b = from_othogonal_vectors[0], from_othogonal_vectors[1] | |
| vector_normal = np.cross(vector_a, vector_b) | |
| return unit_vector(from_vector_and_magnitude=(vector_normal, vector_magnitude(vector_normal))) | |
| if from_orthogonal_unit_vectors is not None: | |
| u1, u2 = from_orthogonal_unit_vectors[0], from_orthogonal_unit_vectors[1] | |
| return np.cross(u1, u2) | |
| def evaluate_vector(vector, time_step): | |
| """ | |
| evaluate numerical vector components and magnitude @ti | |
| param numerical_vector: symbolic vector expression to evaluate @ti | |
| param ti: time step for evaluation | |
| return magnitude, numerical_vector: magnitude of vector and components evaluated @ti | |
| """ | |
| numerical_vector = [float(component.subs(t, time_step).evalf()) for component in vector] | |
| magnitude = vector_magnitude(numerical_vector) | |
| return numerical_vector, magnitude | |
| def direction_angles(vector, magnitude=None): | |
| """ | |
| compute direction angles a vector makes with +x,y,z axes | |
| param vector: vector with x, y, z components | |
| param magnitude: magnitude of vector | |
| """ | |
| magnitude = vector_magnitude(vector) if magnitude is None else magnitude | |
| return [sp.acos(component / magnitude) for component in vector] | |
| # ============================== | |
| # helper functions | |
| def d2r(degrees): | |
| """ | |
| convert from degrees to radians | |
| return: radians | |
| """ | |
| return degrees * (np.pi / 180) | |
| def r2d(radians): | |
| """ | |
| convert from radians to degrees | |
| return: degrees | |
| """ | |
| return radians * (180 / np.pi) | |
| # ======================================= | |
| # simulation harness | |
| # initial time | |
| t0 = 0 | |
| # end time | |
| tf = 720 | |
| # change in time | |
| dt = 1 | |
| # time array | |
| time = np.arange(t0, tf, dt, dtype='float') | |
| # ======================================= | |
| # symbolic equations of motion | |
| # Define symbolic variable t | |
| t = sp.symbols('t') | |
| # [x(t), y(t), z(t)] position as function of time | |
| # R = [sp.sin(3 * t), sp.cos(t), sp.cos(2 * t)] | |
| R = [sp.cos(t), sp.sin(t), t / 5] # Helix: z=t | |
| # R = [sp.cos(t), sp.sin(t), 0 * t] # Circle: z=0*t | |
| # velocity = dR/dt | |
| V = vector_derivative(R, t) | |
| # acceleration = dV/dt | |
| A = vector_derivative(V, t) | |
| # tangential acceleration = dV/dt (derivative of the magnitude of velocity) | |
| At = vector_magnitude(V).diff(t) | |
| # ======================================= | |
| # propgate system through time | |
| propagation_time_history = [] | |
| for ti in time: | |
| ti_r = d2r(ti) | |
| # evaluate position | |
| r, r_mag = evaluate_vector(R, ti_r) | |
| # evaluate velocity | |
| v, v_mag = evaluate_vector(V, ti_r) | |
| # evaluate acceleration | |
| a, a_mag = evaluate_vector(A, ti_r) | |
| # velocity direction angles | |
| v_theta = [r2d(angle) for angle in direction_angles(v, v_mag)] | |
| # acceleration direction angles | |
| a_theta = [r2d(angle) for angle in direction_angles(a, a_mag)] | |
| # unit vector tanjent to trajectory | |
| ut = unit_vector(from_vector_and_magnitude=(v, v_mag)) | |
| # unit binormal | |
| ub = unit_vector(from_othogonal_vectors=(v, a)) | |
| # unit normal | |
| un = unit_vector(from_orthogonal_unit_vectors=(ub, ut)) | |
| # tangential acceleration magnitude | |
| at = float(At.subs(t, ti_r).evalf()) | |
| # normal acceleration | |
| an = np.dot(a, un) | |
| # radius of curvature | |
| rho = v_mag ** 2 / an | |
| # position vector of the center of curvature | |
| rc = r + (rho * un) | |
| # magnitude of the position vector of the center of curvature | |
| rc_mag = vector_magnitude(rc) | |
| iteration_results = {'t': ti, 'rx': r[0], 'ry': r[1], 'rz': r[2], 'r_mag': r_mag, | |
| 'vx': v[0], 'vy': v[1], 'vz': v[2], 'v_mag': v_mag, | |
| 'rcx': rc[0], 'rcy': rc[1], 'rcz': rc[2], 'rc_mag': rc_mag, 'rho': rho, | |
| 'ax': a[0], 'ay': a[1], 'az': a[2], 'a_mag': a_mag, 'an': an, 'at': at, | |
| 'ubx': ub[0], 'uby': ub[1], 'ubz': ub[2], | |
| 'utx': ut[0], 'uty': ut[1], 'utz': ut[2], | |
| 'unx': un[0], 'uny': un[1], 'unz': un[2]} | |
| propagation_time_history.append(iteration_results) | |
| df = pd.DataFrame(propagation_time_history) | |
| # ============================== | |
| # run configuration | |
| database_directory = './results/' | |
| database_name = 'orbit' | |
| table_name = 'orbit' | |
| animation_directory = './animations/' | |
| os.makedirs(animation_directory, exist_ok=True) | |
| # ======================================= | |
| # visualise trajectory | |
| def vector_arrow_3d(x0, x1, y0, y1, z0, z1, color): | |
| """ | |
| method to create a new arrow in 3d for vectors | |
| return Arrow3D: new vector | |
| """ | |
| return Arrow3D([x0, x1], [y0, y1], [z0, z1], | |
| mutation_scale=10, lw=1, | |
| arrowstyle='-|>', color=color) | |
| class Animator: | |
| def __init__(self, simulation_results): | |
| self.simulation_results = simulation_results | |
| self.vector_lines = [] | |
| # ======================================= | |
| # configure plots and data structures | |
| self.fig = plt.figure(figsize=(15, 8)) | |
| self.fig.subplots_adjust(left=0.05, | |
| bottom=None, | |
| right=0.95, | |
| top=None, | |
| wspace=None, | |
| hspace=0.28) | |
| gs = gridspec.GridSpec(2, 2) | |
| self.ax1 = self.fig.add_subplot(gs[:, 0], projection='3d') | |
| self.ax2 = self.fig.add_subplot(gs[0, 1]) | |
| self.ax3 = self.ax2.twinx() | |
| self.ax4 = self.fig.add_subplot(gs[1, 1]) | |
| self.ax5 = self.ax4.twinx() | |
| self.set_axes_limits() | |
| # axis 1 - 3D visualisation | |
| self.trajectory, = self.ax1.plot([], [], [], 'bo', markersize=1) | |
| self.center_of_curvature, = self.ax1.plot([], [], [], 'mo', markersize=2) | |
| self.pos_text = self.text_artist_3d(' r', 'g') | |
| self.coc_text = self.text_artist_3d(' c', 'm') | |
| self.vel_text = self.text_artist_3d(' v', 'r') | |
| self.un_text = self.text_artist_3d(' un', 'k') | |
| self.ub_text = self.text_artist_3d(' ub', 'k') | |
| self.ut_text = self.text_artist_3d(' ut', 'k') | |
| # axis 2, 3 - position and velocity magnitudes vs time | |
| self.rvt, = self.ax2.plot([], [], 'g-') | |
| self.vvt, = self.ax3.plot([], [], 'r-') | |
| self.rmag_text = self.ax2.text(0, 0, '', size=12, color='g') | |
| # axis 4, 5 - normal and tangential acceleration vs time | |
| self.ant, = self.ax4.plot([], [], 'c-') | |
| self.att, = self.ax5.plot([], [], 'y-') | |
| def draw_xyz_axis(self, x_lims, y_lims, z_lims): | |
| """ | |
| draw xyz axis on ax1 3d plot | |
| param x_lims: upper and lower x limits | |
| param y_lims: upper and lower y limits | |
| param z_lims: upper and lower z limits | |
| """ | |
| self.ax1.plot([0, 0], [0, 0], [0, 0], 'ko', label='Origin') | |
| self.ax1.plot(x_lims, [0, 0], [0, 0], 'k-', lw=1) | |
| self.ax1.plot([0, 0], y_lims, [0, 0], 'k-', lw=1) | |
| self.ax1.plot([0, 0], [0, 0], z_lims, 'k-', lw=1) | |
| self.text_artist_3d('x', 'k', x_lims[1], 0, 0) | |
| self.text_artist_3d('y', 'k', 0, y_lims[1], 0) | |
| self.text_artist_3d('z', 'k', 0, 0, z_lims[1]) | |
| self.ax1.set_xlabel('x') | |
| self.ax1.set_ylabel('y') | |
| self.ax1.set_zlabel('z') | |
| def text_artist_3d(self, text, color, x=0, y=0, z=0): | |
| """ | |
| create new text artist for the plot | |
| param txt: text string | |
| param color: text color | |
| param x: x coordinate of text | |
| param y: y coordinate of text | |
| param z: z coordinate of text | |
| """ | |
| return self.ax1.text(x, y, z, text, size=11, color=color) | |
| def set_axes_limits(self): | |
| """ | |
| set the axis limits for each plot, label axes | |
| """ | |
| lim_params = ['r', 'v', 'rc'] | |
| x_lims = self.get_limits(lim_params, 'x') | |
| y_lims = self.get_limits(lim_params, 'y') | |
| z_lims = self.get_limits(lim_params, 'z') | |
| self.ax1.set_xlim3d(x_lims) | |
| self.ax1.set_ylim3d(y_lims) | |
| self.ax1.set_zlim3d(z_lims) | |
| self.draw_xyz_axis(x_lims, y_lims, z_lims) | |
| t_lims = self.get_limits(['t'], '') | |
| self.ax2.set_xlim(t_lims) | |
| self.ax2.set_ylim(self.get_limits(['r_mag'], '')) | |
| self.ax2.set_xlabel('t (s)') | |
| self.ax2.set_ylabel('r_mag (m)', color='g') | |
| self.ax3.set_ylim(self.get_limits(['v_mag'], '')) | |
| self.ax3.set_ylabel('v_mag (m/s)', color='r') | |
| self.ax4.set_xlim(t_lims) | |
| self.ax4.set_ylim(self.get_limits(['an'], '')) | |
| self.ax4.set_xlabel('t (s)') | |
| self.ax4.set_ylabel('an (m/s^2)', color='c') | |
| self.ax5.set_ylim(self.get_limits(['at'], '')) | |
| self.ax5.set_ylabel('at (m/s^2)', color='y') | |
| def get_limits(self, params, axis): | |
| """ | |
| get upper and lower limits for parameter | |
| param axis: get limits for axis, i.e x or y | |
| param params: list of varaible names | |
| """ | |
| lower_lim, upper_lim = 0, 0 | |
| for p in params: | |
| m = max(self.simulation_results['%s%s' % (p, axis)]) | |
| if m > upper_lim: | |
| upper_lim = m | |
| m = min(self.simulation_results['%s%s' % (p, axis)]) | |
| if m < lower_lim: | |
| lower_lim = m | |
| return lower_lim - 0.05, upper_lim + 0.05 | |
| def config_plots(self): | |
| """ | |
| Setting the axes properties such as title, limits, labels | |
| """ | |
| self.ax1.set_title('Trajectory Visualisation') | |
| self.ax2.set_title('Position and Velocity Magnitudes vs Time') | |
| self.ax4.set_title('Normal and Tangential Acceleration vs Time') | |
| self.ax1.set_position([0, 0, 0.5, 1]) | |
| self.ax1.set_aspect('auto') | |
| self.ax2.grid() | |
| self.ax4.grid() | |
| def visualize(self, i): | |
| # ###### | |
| # axis 1 | |
| row = self.simulation_results.iloc[i] | |
| # define vectors | |
| vectors = [vector_arrow_3d(0, row.rx, 0, row.ry, 0, row.rz, 'g'), | |
| vector_arrow_3d(row.rx, row.rx + row.vx, row.ry, row.ry + row.vy, row.rz, row.rz + row.vz, 'r'), | |
| vector_arrow_3d(row.rx, row.rx + row.ubx, row.ry, row.ry + row.uby, row.rz, row.rz + row.ubz, 'k'), | |
| vector_arrow_3d(row.rx, row.rx + row.utx, row.ry, row.ry + row.uty, row.rz, row.rz + row.utz, 'k'), | |
| vector_arrow_3d(row.rx, row.rx + row.unx, row.ry, row.ry + row.uny, row.rz, row.rz + row.unz, 'k'), | |
| vector_arrow_3d(row.rcx, row.rx, row.rcy, row.ry, row.rcz, row.rz, 'm')] | |
| # add vectors to figure | |
| [self.ax1.add_artist(vector) for vector in vectors] | |
| # remove previous vectors from figure | |
| if self.vector_lines: | |
| [vector.remove() for vector in self.vector_lines] | |
| self.vector_lines = vectors | |
| # update label text and position | |
| self.pos_text.set_position((row.rx, row.ry)) | |
| self.pos_text.set_3d_properties(row.rz, 'x') | |
| self.coc_text.set_position((row.rcx, row.rcy)) | |
| self.coc_text.set_3d_properties(row.rcz, 'x') | |
| self.vel_text.set_position((row.rx + row.vx, row.ry + row.vy)) | |
| self.vel_text.set_3d_properties(row.rz + row.vz, 'x') | |
| self.un_text.set_position((row.rx + row.unx, row.ry + row.uny)) | |
| self.un_text.set_3d_properties(row.rz + row.unz, 'x') | |
| self.ub_text.set_position((row.rx + row.ubx, row.ry + row.uby)) | |
| self.ub_text.set_3d_properties(row.rz + row.ubz, 'x') | |
| self.ut_text.set_position((row.rx + row.utx, row.ry + row.uty)) | |
| self.ut_text.set_3d_properties(row.rz + row.utz, 'x') | |
| # update trajectory for current time step | |
| self.trajectory.set_data(self.simulation_results['rx'][:i], self.simulation_results['ry'][:i]) | |
| self.trajectory.set_3d_properties(self.simulation_results['rz'][:i]) | |
| # update center of curvature for current time step | |
| self.center_of_curvature.set_data(self.simulation_results['rcx'][i], self.simulation_results['rcy'][i]) | |
| self.center_of_curvature.set_3d_properties(self.simulation_results['rcz'][i]) | |
| # update position magnitude text position | |
| self.rmag_text.set_position((self.simulation_results['t'][i], self.simulation_results['r_mag'][i])) | |
| self.rmag_text.set_text(f"{round(self.simulation_results['r_mag'][i], 2)}") | |
| # ###### | |
| # axis 2 | |
| time_step = self.simulation_results['t'][:i] | |
| # magnitude of position vs time | |
| self.rvt.set_data(time_step, self.simulation_results['r_mag'][:i]) | |
| # magnitude of velocity vs time | |
| self.vvt.set_data(time_step, self.simulation_results['v_mag'][:i]) | |
| # ###### | |
| # axis 3 | |
| self.ant.set_data(time_step, self.simulation_results['an'][:i]) | |
| self.att.set_data(time_step, self.simulation_results['at'][:i]) | |
| # plt.pause(0.05) | |
| def animate(self): | |
| """ | |
| animate drawing velocity vector as particle | |
| moves along trajectory | |
| return: animation | |
| """ | |
| return animation.FuncAnimation(self.fig, | |
| self.visualize, | |
| frames=len(time), | |
| init_func=self.config_plots(), | |
| blit=False, | |
| repeat=False, | |
| interval=2) | |
| # ======================================= | |
| # save trajectory animation | |
| animator = Animator(simulation_results=df) | |
| anim = animator.animate() | |
| plt.show() | |
| os.makedirs('./animations', exist_ok=True) | |
| FFwriter = animation.FFMpegWriter(fps=30) | |
| anim.save('./animations/spiral_trajectory.gif', writer=FFwriter) |
This file contains hidden or bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| # ======================================= | |
| # propagate system through time | |
| propagation_time_history = [] | |
| for ti in time: | |
| ti_r = d2r(ti) | |
| # evaluate position | |
| r, r_mag = evaluate_vector(R, ti_r) | |
| # evaluate velocity | |
| v, v_mag = evaluate_vector(V, ti_r) | |
| # evaluate acceleration | |
| a, a_mag = evaluate_vector(A, ti_r) | |
| # velocity direction angles | |
| v_theta = [r2d(angle) for angle in direction_angles(v, v_mag)] | |
| # acceleration direction angles | |
| a_theta = [r2d(angle) for angle in direction_angles(a, a_mag)] | |
| # unit vector tanjent to trajectory | |
| ut = unit_vector(from_vector_and_magnitude=(v, v_mag)) | |
| # unit binormal | |
| ub = unit_vector(from_othogonal_vectors=(v, a)) | |
| # unit normal | |
| un = unit_vector(from_orthogonal_unit_vectors=(ub, ut)) | |
| # tangential acceleration magnitude | |
| at = float(At.subs(t, ti_r).evalf()) | |
| # normal acceleration | |
| an = np.dot(a, un) | |
| # radius of curvature | |
| rho = v_mag ** 2 / an | |
| # position vector of the center of curvature | |
| rc = r + (rho * un) | |
| # magnitude of the position vector of the center of curvature | |
| rc_mag = vector_magnitude(rc) | |
| iteration_results = {'t': ti, 'rx': r[0], 'ry': r[1], 'rz': r[2], 'r_mag': r_mag, | |
| 'vx': v[0], 'vy': v[1], 'vz': v[2], 'v_mag': v_mag, | |
| 'rcx': rc[0], 'rcy': rc[1], 'rcz': rc[2], 'rc_mag': rc_mag, 'rho': rho, | |
| 'ax': a[0], 'ay': a[1], 'az': a[2], 'a_mag': a_mag, 'an': an, 'at': at, | |
| 'ubx': ub[0], 'uby': ub[1], 'ubz': ub[2], | |
| 'utx': ut[0], 'uty': ut[1], 'utz': ut[2], | |
| 'unx': un[0], 'uny': un[1], 'unz': un[2]} | |
| propagation_time_history.append(iteration_results) | |
| df = pd.DataFrame(propagation_time_history) |
This file contains hidden or bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| # ======================================= | |
| # simulation harness | |
| # initial time | |
| t0 = 0 | |
| # end time | |
| tf = 720 | |
| # change in time | |
| dt = 1 | |
| # time array | |
| time = np.arange(t0, tf, dt, dtype='float') |
This file contains hidden or bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| # ======================================= | |
| # symbolic equations of motion | |
| # Define symbolic variable t | |
| t = sp.symbols('t') | |
| # [x(t), y(t), z(t)] position as function of time | |
| # R = [sp.sin(3 * t), sp.cos(t), sp.cos(2 * t)] | |
| R = [sp.cos(t), sp.sin(t), t / 5] # Helix: z=t | |
| # R = [sp.cos(t), sp.sin(t), 0 * t] # Circle: z=0*t | |
| # velocity = dR/dt | |
| V = vector_derivative(R, t) | |
| # acceleration = dV/dt | |
| A = vector_derivative(V, t) | |
| # tangential acceleration = dV/dt (derivative of the magnitude of velocity) | |
| At = vector_magnitude(V).diff(t) |
This file contains hidden or bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| # ============================== | |
| # vector equations | |
| def vector_derivative(vector, wrt): | |
| """ | |
| differentiate vector components wrt a symbolic variable | |
| param v: vector to differentiate | |
| param wrt: symbolic variable | |
| return V: velcoity vector and components in x, y, z | |
| """ | |
| return [component.diff(wrt) for component in vector] | |
| def vector_magnitude(vector): | |
| """ | |
| compute magnitude of a vector | |
| param vector: vector with components of Cartesian form | |
| return magnitude: magnitude of vector | |
| """ | |
| # NOTE: np.linalg.norm(v) computes Euclidean norm | |
| magnitude = 0 | |
| for component in vector: | |
| magnitude += component ** 2 | |
| return magnitude ** (1 / 2) | |
| def unit_vector(from_vector_and_magnitude=None, from_othogonal_vectors=None, from_orthogonal_unit_vectors=None): | |
| """ | |
| Calculate a unit vector using one of three input parameters. | |
| 1. using vector and vector magnitude | |
| 2. using orthogonal vectors | |
| 3. using orthogonal unit vectors | |
| """ | |
| if from_vector_and_magnitude is not None: | |
| vector_a, magnitude = from_vector_and_magnitude[0], from_vector_and_magnitude[1] | |
| return [component / magnitude for component in vector_a] | |
| if from_othogonal_vectors is not None: | |
| vector_a, vector_b = from_othogonal_vectors[0], from_othogonal_vectors[1] | |
| vector_normal = np.cross(vector_a, vector_b) | |
| return unit_vector(from_vector_and_magnitude=(vector_normal, vector_magnitude(vector_normal))) | |
| if from_orthogonal_unit_vectors is not None: | |
| u1, u2 = from_orthogonal_unit_vectors[0], from_orthogonal_unit_vectors[1] | |
| return np.cross(u1, u2) | |
| def evaluate_vector(vector, time_step): | |
| """ | |
| evaluate numerical vector components and magnitude @ti | |
| param numerical_vector: symbolic vector expression to evaluate @ti | |
| param ti: time step for evaluation | |
| return magnitude, numerical_vector: magnitude of vector and components evaluated @ti | |
| """ | |
| numerical_vector = [float(component.subs(t, time_step).evalf()) for component in vector] | |
| magnitude = vector_magnitude(numerical_vector) | |
| return numerical_vector, magnitude |
bro, where is the library called arrow_3d
I want to know about arrow_3d too
Arrow3D is in the repo.
Dear sir
First of all, thank you for really nice job.
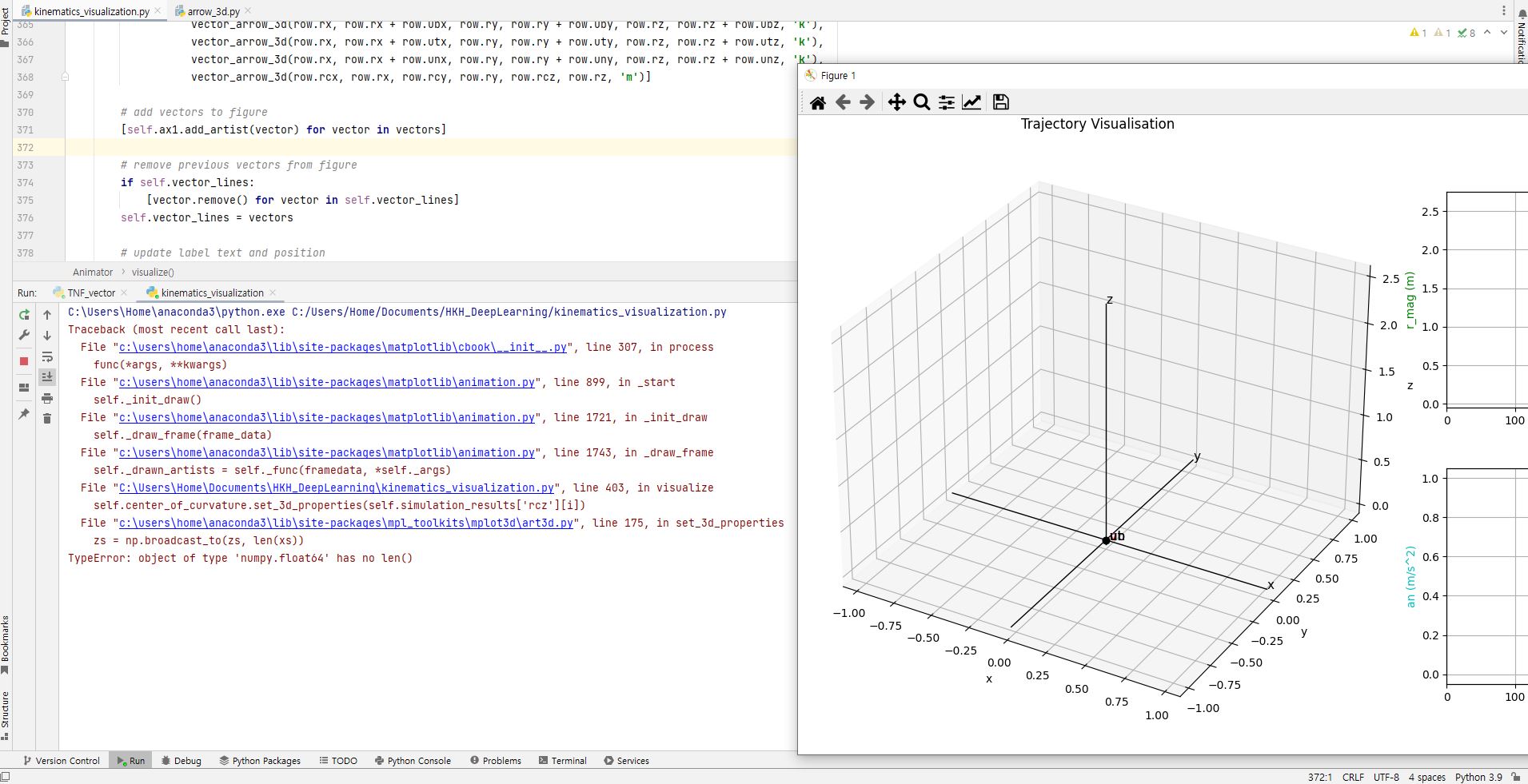
But when I run it, it says
"TypeError: object of type 'numpy.float64' has no len()"
and I cannot see your fancy graph.
Best regards
YS Jeong
Sign up for free
to join this conversation on GitHub.
Already have an account?
Sign in to comment
bro, where is the library called arrow_3d