ref: http://zhaoxuhui.top/blog/2019/10/14/robotics-perception-note-1.html#7pinhole-camera-model
- 理想
- 针对CCD类型的传感器
相机坐标系 像素坐标系
有限摄像机 非奇异
无穷远摄像机 奇异
投影矩阵
da
ref: http://zhaoxuhui.top/blog/2019/10/14/robotics-perception-note-1.html#7pinhole-camera-model
相机坐标系 像素坐标系
有限摄像机 非奇异
无穷远摄像机 奇异
投影矩阵
da
定义:射影映射是$IP^2$到它自身的一种满足下列条件的可逆映射h: 三点$x_1,x_2,x_3$共线当且仅当$h(x_1),h(x_2),h(x_3)$也共线

ref: https://www.cvg.ethz.ch/teaching/3dvision/2021/slides/class02eth21.pdf
点线的齐次表示(Homogenous coordinates)以及一些性质
叉积
Point-Line Duality
理想点与无穷远直线
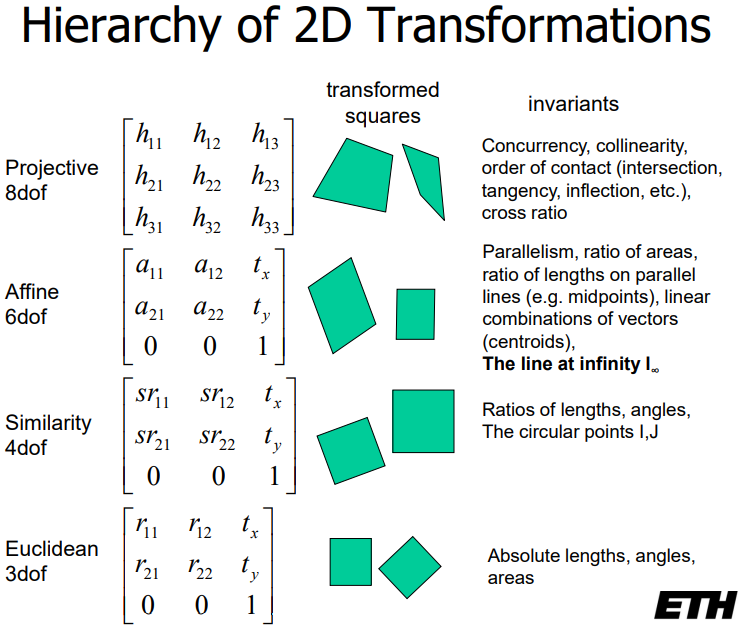
Projective linear group
- Affine group (last row(0,0,1))
- Euclidean group (upper left 2x2 orthogonal)
- Oriented Euclidean group (upper left 2x2 det 1)
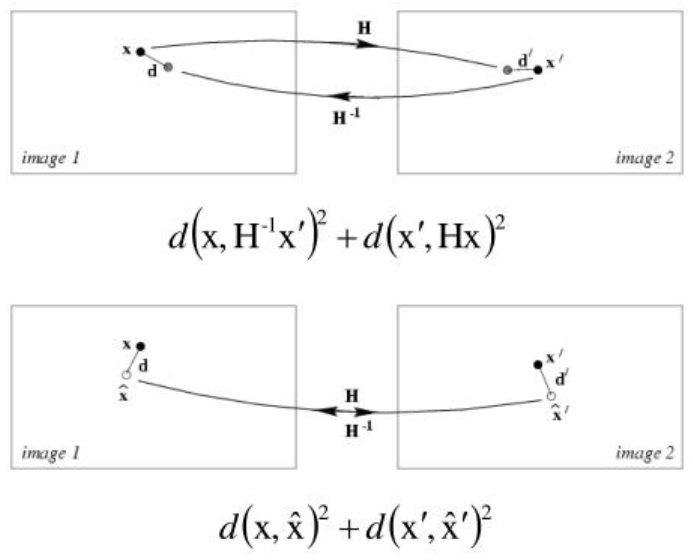
Transformation of Points and Lines
http://zhaoxuhui.top/blog/2019/11/07/robotics-perception-note-3-1.html
特征应该具备的性质
具备检测的可重复性(Detection Repeatability)或者说在不同影像中的检测不变性(Detection Invariance)。 为了能匹配正确的点对,我们也希望特征具有描述不变性(Descriptor Invariance)
SIFT SIFT尺度空间的建立过程:将原始影像与不同参数的高斯核做卷积,即可得到不同模糊程度的影像。 影像金字塔的建立过程。每当高斯核的σ变为原来的2倍时,对影像进行降采样。